
Exploring the ARMv8 system level - Multi-Cores
Within the past months I collected some experiences with enabling Genode's own hw kernel on ARMv8 hardware platforms. A first series of posts covered the low-level first steps that had to be taken. In this forth part I like to summarize the insights gained by enabling multi-cores of the NXP i.MX 8M SoC, and by investigating several other SoCs and its SMP setup.
TrustZone firmware standardization
When implementing a multi-processor platform, a common problem is the activation and deactivation of cores. When booting up additional cores, the configuration of its entrypoints is needed. For power-efficiency reasons, whenever a core is not used for a longer time, it should enter a more deep sleep mode.
All these mechanisms used to be implemented in vendor-specific ways in previous ARM architectures. But with ARMv8, a de facto standard got asserted, the ARM's Power State Coordination Interface (PSCI). It unifies:
-
Core idle management.
-
Dynamic addition and removal of cores, and secondary core boot.
-
System shutdown and reset.
But it does not govern voltage and frequency scaling. Nevertheless, it greatly simplifies multi-core management for higher-level operating-systems across different ARMv8 platforms.
Under the hood, the PSCI back-end functionality is implemented as part of secure world software running in EL3 mode that is provided by the SoC vendor. In practice, many vendors resort to the ARM Trusted Firmware reference implementation, which combines various standards:
-
Power State Coordination Interface (PSCI)
-
Trusted Board Boot Requirements (TTBR)
-
Secure Monitor Code
The last mentioned standard is simply a calling convention from the non-secure world to the trusted firmware. TTBR - as the name suggests - is a formalization of the requirements related to firmware signing, certificate handling, and trusted boot into the non-secure world in general.
|
|
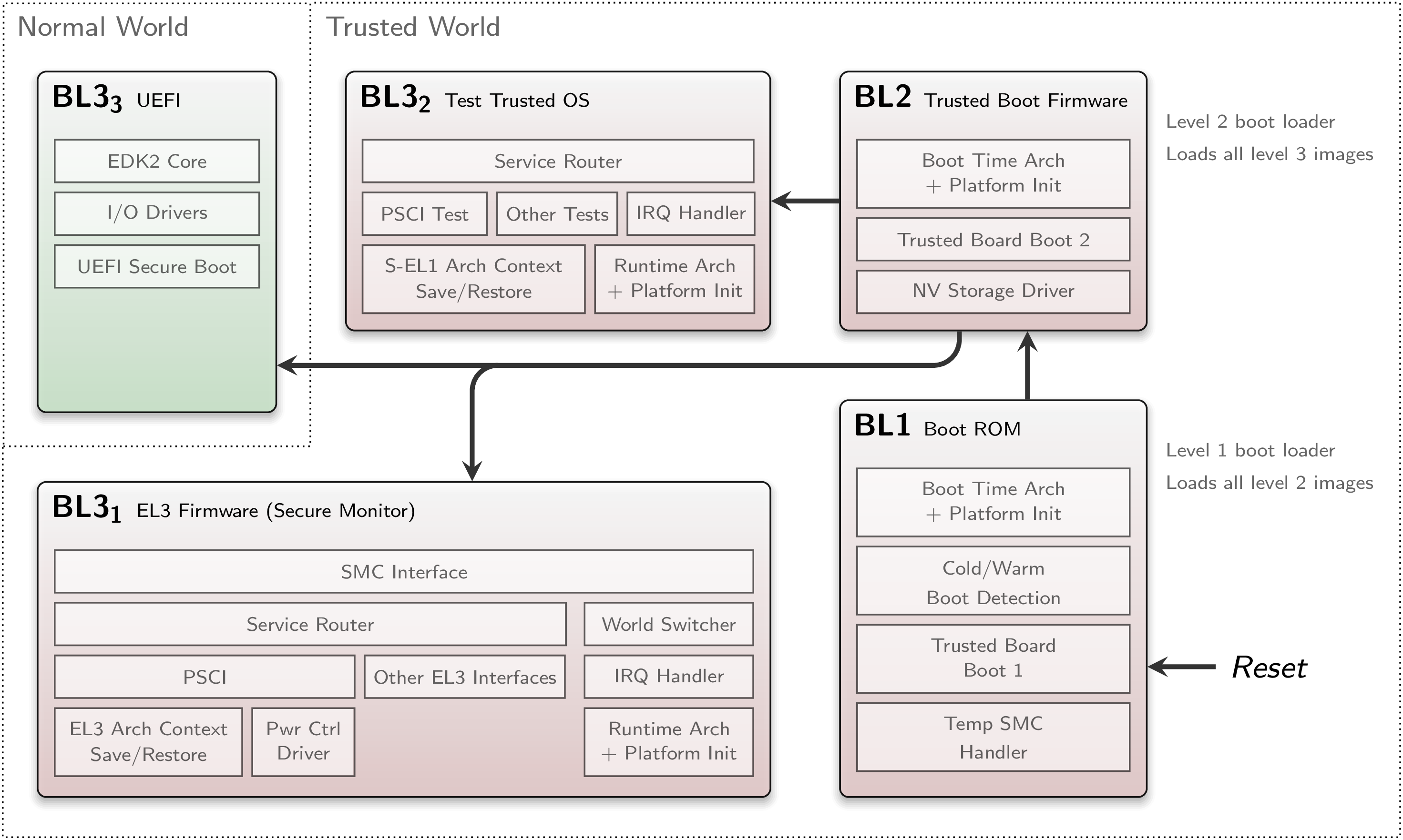
ARM Trusted Firmware Architecture and Boot Flow
|
The standardization and opening of TrustZone firmware in form of the ARM Trusted Firmware was made possible by the introduction of the ARMv8 architecture, which does not allow execution of 32-bit legacy code inside secure monitor mode (EL3). Due to this rupture, OEM vendors were open to adapt to ARM's reference implementation. In terms of security, it reduces complexity of the operating system dealing with multi-cores, and it enables the review and confirmability of OEM's firmware code. Other closed TrustZone firmware alternative, like Qualcomm's QSEE and Trustonic's Kinibi, seem to converge to these standards too.
But the form of standardization has a non-obvious drawback too. Actually, the EL2 hypervisor mode, and the EL3 secure monitor mode are optional features. On the other hand, it seems more unlikely that a SoC vendor will provide a powerful ARMv8-A many-core system without those additional exception levels. It would mean to break the standard again. Technically speaking, by connecting EL3 firmware and multi-core administration, ARM made EL3 permanent in such systems. From my perspective, there is no strict need for EL2/3 in a mobile platform, when having a secure, component-based architecture like Genode running in EL1/2. Instead, complexity of the hardware, chip area and power consumption could be reduced.
OS-level adaptations for multi-core
Beside the bring-up of secondary CPU-cores, an operating system needs primitives to signal in between different CPUs. Typically, an interrupt-controller offers software-generated interrupts that can target other CPUs in the form of so called Inter-Processor Interrupts (IPIs).
With the new GICv3 interrupt controller, the back-end mechanism to trigger an IPI had to be enabled in our practical work using the Genode OS. Everything else related to inter-processor communication is not architecture-specific and could be reused without modifications.
Power-efficient cross-core locking
To protect global data inside non-preemptive kernel paths in-between different CPU cores, a different lock implementation is needed. When normal threads enter a contended lock, a system-call leads to a scheduling decision. Inside certain exception-handling routines of the kernel, this is not possible. Instead of spinning and wasting power in such a situation, the CPU can be instructed to enter a low-power state via the "WFE" instruction. This energy-efficient spin-lock implementation is specific to the instruction set and cannot be expressed in high-level languages like C/C++. Although not needed functionality-wise, the enablement of this feature was necessary to actually use an emulator like QEMU too. Otherwise, QEMU simply emulates long spining-loops of CPU-cores in the contention case, which renders it unuseable in the context of multiple cores.